自動泊車技術(shù)原理-自動泊車技術(shù)原理圖
【有車以后 話題】說到自動駕駛,大家都知道它是個“不靠譜”的技術(shù),目前還有著很多局限,車企的任務(wù)就是不斷完善相關(guān)技術(shù),使之更靠譜。2021年,我們終于能教自己的車開車。
人教車開車?聽著有點拗口,其實上它由最新的記憶泊車功能實現(xiàn)。記憶泊車和自動泊車有啥差別?我們來一探究竟。
威馬W6實現(xiàn)了停車場內(nèi)無人自主學(xué)習(xí)泊車功能(HAVP),小鵬通過OTA更新讓P7實現(xiàn)了停車場內(nèi)記憶泊車(VPA),還有很多車企也即將會推出類似的功能,記憶泊車可謂是2021年的風(fēng)潮。
所謂的記憶泊車,就是讓駕駛員在停車場內(nèi)教一遍車輛如何泊車入庫。車輛學(xué)會以后,再次進入停車場,汽車就會自己開到車位里,全程不需要駕駛員進行任何操作。簡單來說記憶泊車分為“教學(xué)、學(xué)習(xí)、復(fù)現(xiàn)”三個階段。
已經(jīng)有自動泊車了,還需不需要記憶泊車?當然需要,大部分上班族其實停車花費的時間就很長,記憶泊車能把這部分時間解放出來,你到停車場門口就下車,接下來的動作就由車輛自己完成了,這才是真正的自動駕駛。
早在2017年,戴姆勒和博世就研發(fā)出了L4級的無人自主泊車功能,只不過停車場需要每間隔3個停車位就要安裝一個激光雷達,成本太高了。特斯拉的FSD有智能召喚功能,不需要特定的停車場,依靠GPS,車子可召喚至跟前,局限是地下車庫的GPS信號很弱。
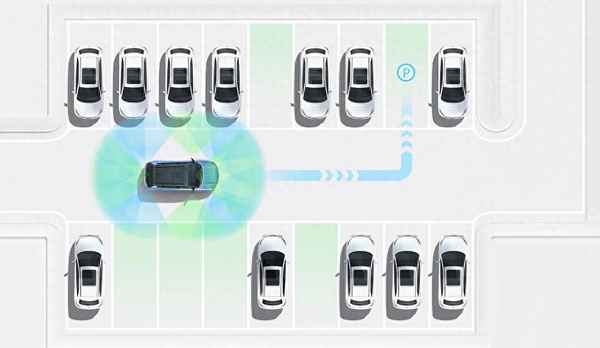
中國車企能人所不能,開發(fā)出了記憶泊車功能,從技術(shù)上來看,記憶泊車本質(zhì)上是利用傳感器和攝像頭對停車場進行“掃描”,數(shù)據(jù)傳回“大腦”進行停車場建模,開了“地圖”,就能輕松找到“位置”。
在停車場內(nèi),有許多規(guī)律可循的場景,例如規(guī)則的車位線、停放整齊的車輛,除露天停車場外,還擁有承重柱、墻面等特征物體。這些東西是不變,計算設(shè)備能夠一幀一幀拼接出整個感知過程的語義特征圖。同時,依靠輪速計推斷車輛位置,最終能夠畫出一張車輛運行的地圖。
小鵬和威馬兩車企的技術(shù)路線又有所不同,小鵬更注重視覺感知,威馬更注重傳感器融合。
小鵬P7在記憶泊車過程中,會開啟車身全部攝像頭,包括4個環(huán)視攝像頭和10個高感知攝像頭。環(huán)視攝像頭與高感知攝像頭的配合,二者配合能夠?qū)φ麄€環(huán)境進行更精準的建模。
威馬W6也調(diào)用了全部傳感器,包括1個駕駛行為檢測攝像頭、2個前視攝像頭、4個環(huán)視攝像頭、5個毫米波雷達和12個超聲波雷達。其中,覆蓋在全車四周的6枚攝像頭負責(zé)以視覺成像形式,幫助車輛感知路況和周身環(huán)境。毫米波雷達和超聲波雷達在雨、霧、雪天氣下表現(xiàn)優(yōu)秀,露天停車場環(huán)境能夠發(fā)揮出良好的性能。
值得一提的是,小鵬在“看”的過程中就順便把圖建成了,完全依靠小鵬搭載的英偉達Xavier自動駕駛芯片,算力能夠達到30TOPS。威馬則是看的時候先記下所有的感知數(shù)據(jù),上傳到百度Apollo云端服務(wù)器,它的云端算力最高能達到100萬TOPS級別,為所有威馬W6提供云端算力。
對于這類“自動駕駛”功能,必須得發(fā)出靈魂一問:它安全嗎?小鵬和威馬進入記憶泊車后,都有禮讓行人的準則,點贊。
如果遇到正在行駛的車輛,此時小鵬P7則會使用毫米波雷達感知前方車輛的速度、加速度,以及與本車的距離,從而判斷等待或者避讓。在最終泊車階段,也會利用超聲波雷達感知近距離的障礙物。
威馬W6則主要依托攝像頭+超聲波雷達共同識別的方案進行避障。針對行人、車輛、錐桶等常見障礙物,威馬W6會通過視覺方面的特征識別,車輛即可感知障礙物的存在,并進行避讓;針對箱子、沙石等不常見的障礙物,威馬W6依托超聲波雷達,感知障礙物。發(fā)現(xiàn)障礙物后,車輛會根據(jù)障礙物的當前距離進行決策,并在合適的距離自動剎停、避讓。
在停車場這種低速范圍內(nèi),留有足夠的時間給傳感器反應(yīng),所以不用擔心安全問題。
目前大部分車企對自動駕駛的構(gòu)想是高速-城市-停車場這三個,小鵬NGP、蔚來NOP在高速上自動駕駛功能令人滿意。現(xiàn)在,又有了記憶泊車,接下來只剩城市道路了,編輯相信更實用的“自動駕駛”離我們并不遙遠。






